![]()
![]()
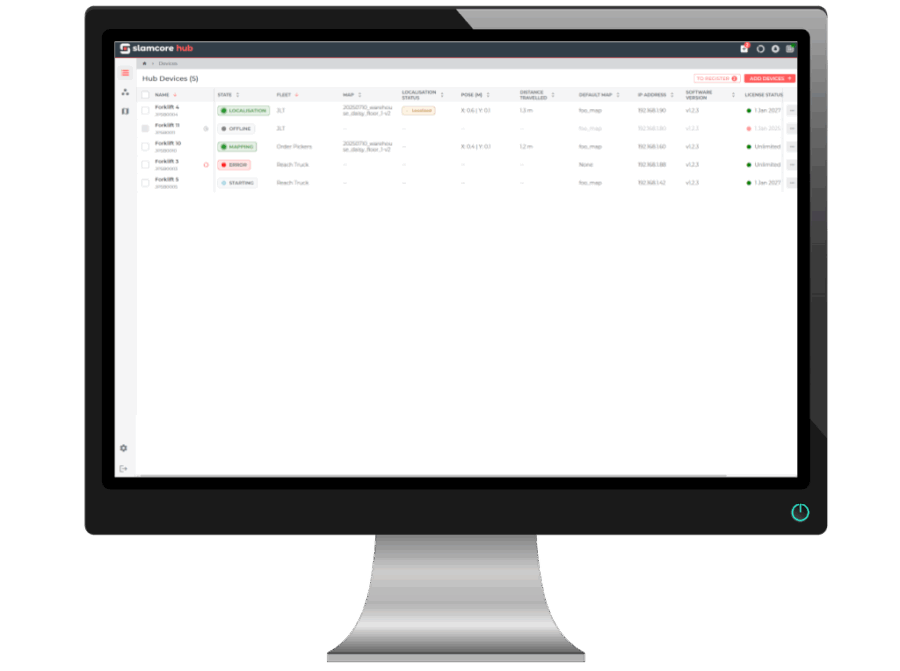
What it is
A retrofit compute and camera module that streams live location and object data (position and orientation). Delivering RTLS without beacons or extra infrastructure required.
Fits on
Forklifts, reach-trucks, and tuggers.
Who it’s for
• System Integrators
• Value Added Resellers
• Operations & Facilities managers
• Safety & Productivity Teams
• Business Intelligence & Analytics Teams
• Forklift OEMs
Availability
Shipping now.